文書バージョン 202405-02
MOS言語仕様、MOS関数リファレンスの用語集です。
エスケープ文字
MOSランゲージでは、次のエスケープ文字が使用できます。
\n:復帰改行
\r:復帰
\t:水平タブ
\":"として扱う
\\:\として扱う
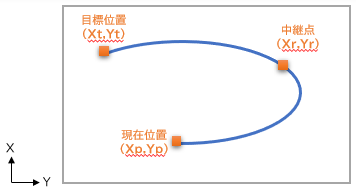
円弧補間動作
円弧補間動作では、移動途中の1つの中継点を経由して目標位置へ、円弧の軌跡を描いて移動します。MOTIWAREでは円弧補間の対象は2次元です。対象軸以外は、対象軸の移動開始と移動終了に同期して動きます。
オーバトラベルリセットモード
オーバトラベルリセットモードとは、ロボットがオーバトラベル状態(FOTセンサまたはROTセンサが感知している状態)でロボットエラーを発生していても、ロボットエラーをリセットしてサーボONを行うことができるモード(機能)です。
オーバトラベルリセットモードに設定されている状態では、オーバトラベルを検出することができません。通常はオーバトラベルリセットモードを解除して使用してください。
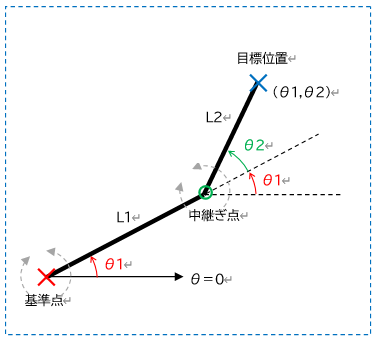
関節座標系
下図のように、長さL1のアームと長さL2のアームと、それを接続する1つの中継ぎ点が存在するような関節機構で使用される座標系です。θ=0に対してL1とL2が成す角度で表し、目標位置を(θ1, θ2)と定義します。一般的には2次元または3次元です。
MOTIWAREでは現在、関節機構をサポートしておりません。
機械原点
RobReturnHome関数などの原点復帰指令を実行した時の、原点センサの取り付け位置によって定まる原点です。
基準機械原点
ManagerAM3から基準原点復帰を実行した時の、原点センサの取り付け位置によって定まる原点です。
エンコーダA、B、Z相がある場合、原点センサのエッジ(機械原点)をエンコーダ分解能で電気的に精密に測定、再現するようにした機械原点です。
基準原点復帰操作を行い、ManagerAM3画面に表示されたReturnHomeStandardPulseパラメータの値をコンフィギュレーションファイルに設定して有効化することにより、その基準原点復帰を完了した位置が基準機械原点になります。
基準機械原点は、後に基準原点復帰操作を行ってReturnHomeStandardPulseパラメータの値をコンフィギュレーションファイルに設定し、有効化するまでの基準位置になります。
現在位置
RobGetCartePosition関数、RobGetJointPosition関数、RobGetPulsePosition関数で得られる現在位置、およびRobSetDiPositionCapture関数で得られるキャプチャ位置は、コンフィギュレーションファイルのEncorderEnableパラメータによって次のようになります。
EncorderEnable=1の軸:エンコーダ信号によるフィードバックパルス位置カウンタの値が得られます。
EncorderEnable=0の軸:コンフィギュレーションファイルのUseHwPulseAsFbPulseパラメータが0であればモーションコントローラ演算指令値が得られます。UseHwPulseAsFbPulseパラメータが1であればパルス列出力カウンタの値が得られます。
現在位置は、移動動作の進捗によって刻々と変化します。
現在指令位置
RobGetCarteCmdPosition関数、RobGetJointCmdPosition関数、RobGetPulseCmdPosition関数で得られる現在指令位置は、モーションコントローラの演算指令位置を基に表示されます。現在指令位置は、移動動作の進捗によって刻々と変化します。
原点
移動動作において基準となる位置です。MOTIWAREでは、機械原点、論理原点、基準機械原点の、3つの原点があります。
原点センサ
原点サーチで使用するFOTまたはROTセンサ、またはORG(HOME)センサを指します。ORG(HOME)センサを実装していないモーションコントローラもあります。FOT/ROT/ORG(HOME)のどのセンサを原点サーチで使用するかを、コンフィギュレーションファイルのReturnHomeTypeパラメータで指定することができます。
原点復帰基準パルス数
基準原点復帰を実行した時の、最寄りのZ相と、原点センサ検出エッジとのパルス数(距離)です。
ManagerAM3で基準原点復帰を行うと自動的に計測され、原点復帰基準パルス数が表示されます。これをコンフィギュレーションファイルのReturnHomeStandardPulseパラメータに設定すると、以降の原点復帰時にエンコーダ分解能で精密な機械原点、基準機械原点を維持します。
コンフィギュレーションファイル
MOTIWAREの動作や、機構の設定を行うファイル。PCベースモーションコントローラではMotiWareConfig.iniファイル、InterMotionではMotiWareConfigAmx.iniファイルを指します。コンフィギュレーションファイルはコントローラの中で機能しますが、編集などはWindowsのPC上でユーティリティソフトのConfigAM3を用いて行います。
コンフィギュレーションファイルの有効化
コンフィギュレーションファイルは、ConfigAM3で編集・保存し、モーションコントローラに転送しただけでは有効になりません。コンフィギュレーションファイルをモーションコントローラ上で有効化するためには、次の手順でMOTIWARE Serviceの再起動を行う必要があります。
PCベースモーションコントローラの場合:MOTIWARE Serviceを停止した後、再度起動します。一部のパラメータはManagerAM3の[Load config file]ボタンで有効化することができます。
InterMotionの場合:InterMotionの電源をオフした後、再度オンします。または、ManagerAM3かConfigAM3の[CPU リセット]ボタンをクリックします。
最終目標指令位置
RobGetCarteGoal関数、RobGetJointGoal関数、RobGetPulseGoal関数で得られる最終目標指令位置は、モーションコントローラの演算による目標位置を基に表示されます。最終目標指令位置は、RobPtpMove等の移動を伴う関数の実行ごとに更新されます。
システムエラー(System error)
システムエラー(System error)は、各ロボットに依存しないMOTIWAREのシステム全体のエラーです。モーションコントローラのハードウェアの動作が正常でない場合などに発生します。システムエラーの発生要因はこちらを参照してください。
出力制御文字
MOSランゲージでは、次の出力制御文字が使用できます。フィールド幅や精度も指定可能です。
%o:8進数で出力する
%d:10進数で出力する
%ld:long(int)型数値を10進数で出力する
%x, %X:16進数で出力する(%xは小文字、%Xは大文字)
%f:浮動小数点として出力する
%e, %E:指数形式で出力する(%eは小文字、%Eは大文字)
%c:文字として出力する
%s:文字列として出力する
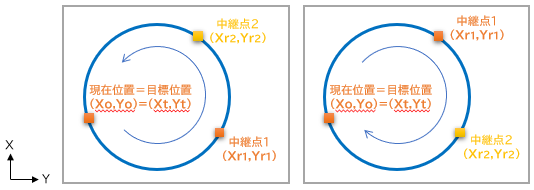
真円補間動作
真円補間動作では、移動途中の2つの中継点を経由して目標位置へ、真円の軌跡を描いて移動します。MOTIWAREでは真円補間の対象は2次元です。対象軸以外は、対象軸の移動開始と移動終了に同期して動きます。
絶対位置指定
指定された絶対位置への移動のこと。Move系関数の引数の動作種別の一種です。
相対位置指定
現在位置からの相対的な移動量を指定する移動のこと。Move系関数の引数の動作種別の一種です。
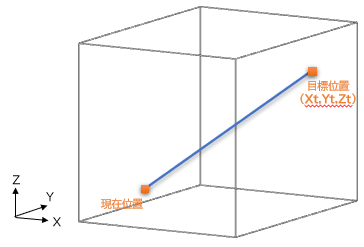
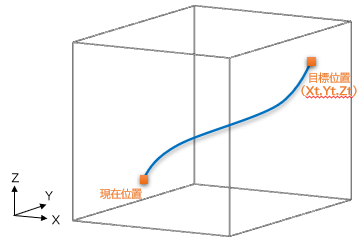
直線補間動作
直線補間動作とは、対象軸に対して移動経路が直線になるよう、位置や速度などを細かく制御する制御方式です。MOTIWAREでは直線補間の対象は3次元です。対象軸以外は、対象軸の移動開始と移動終了に同期して動きます。
致命的エラー(Fatal error)
致命的エラー(Fatal error)は、システムの稼働に関わる重大なエラーです。原因としては、システムのハードウエアとソフトウエアが適合しない、各ソフトウエアのコンポーネントが適合しない、各種設定ファイルの破損などが考えられます。詳細は致命的エラーコード一覧を参照してください。
直交座標系
互いに直交する軸から構成される機構で使用される座標系です。デカルト座標系、カーテシアン座標系、カーティシャン座標系と呼ばれることもあります。一般的には1次元(X軸)または2次元(XY軸)または3次元(XYZ軸)です。MOTIWAREでは最大8軸のロボットを構成可能ですが、例えば同期動作する複数のステージを構成したり
、ステージ上での回転軸、ガントリ軸、エンコーダ入力軸などを加える、などが可能です。
同期命令
関数の処理が完了するまで次の行のプログラムを実行しない実行形態です。例えば、Move系の関数を同期命令で発行すると、移動が完了するまで次の行のプログラムを実行しません。
非同期命令
関数の処理を開始すると、直ちに次の行のプログラムを実行する実行形態です。例えば、Move系の関数を非同期命令で発行すると、移動の完了を待たずに次の行のプログラムを実行します。
物理軸
物理軸とは、軸資源を有するハードウエア(モーションコントローラ)に接続されている物理的なデバイス(モータ)のことで、物理軸番号はデバイスを識別して管理するための番号です。
どの物理軸がどのようなデバイスで、どの物理軸番号として識別されるかは、ハードウエアによって異なります。
補間動作
補間動作とは、移動途中の中継点を指定するなど、経路を重要視する制御方式です。また、複数軸で構成されたロボットにおいて、PTP動作では動作する軸のうち最長の経路を最短時間で移動するよう制御しますが、補間動作では経路に対して速度や加減速が一定になるように制御します。MOTIWAREでは、直交座標系において直線補間動作、円弧補間動作、真円補間動作の3つの補間方式に対応しています。
ポジション配列
ポジション配列は、主にMOS関数の引数としてロボット内の各軸の位置やパラメータを格納するための配列として使用されます。ポジション配列の要素数はMaxRobAxesです。
配列要素[0]はロボットに論理軸1の位置やパラメータを扱います。配列要素[1]はロボットに論理軸2の位置やパラメータを扱います。以下同様に扱われ、配列要素[7]はロボットに論理軸8の位置やパラメータを扱います。
ユーザ単位
ユーザ単位はコンフィギュレーションファイルのScaleパラメータで定義します。
例1)モータとステージからなる直動機構で、ステージを1[mm]送るのに必要なパルス数を1000[パルス]とすれば、Scaleパラメータの値は1000、ユーザ単位は[mm]となります。RobPtpMoveの相対目標位置を+30と設定して発行すれば、現在の位置から+30mmの位置へ移動します。このとき、30×1000=30000パルス発生します。
例2)モータと減速機からなる回転機構で、回転ステージを1[度]回すのに必要なパルス数を3600[パルス]とすれば、Scaleパラメータの値は3600、ユーザ単位は[度]となります。RobPtpMoveの相対目標位置を+0.65と設定して発行すれば、現在の位置から+0.65度の位置へ移動します。このとき、0.65×3600=2340パルス発生します。
ランタイムエラー
ランタイムエラー(実行時エラー)とは、ビルド時には検出されずに、プログラム実行時に発生するエラーです。ランタイムエラーが発生したプログラムは強制終了されます。詳細はランタイムエラーコード一覧を参照してください。
ロボット
MOTIWAREでは基本的な軸(モータ)の制御の単位をロボットと呼びます。1つのロボットは1~8軸で構成されます。複数軸から成るロボットについては軸間の同期運転(同時に移動を開始し、同時に移動を終了する)が可能です。すなわち、同期運転させたい軸(機器)をまとめたグループをロボットと呼びます。
ロボットI/O
MOTIWAREでリアルタイム制御可能なデジタル入出力ポート。MOS関数ではポート番号2049~3072の範囲の512点の入力ポートおよび512点の出力ポートを扱うことができます。この範囲のうち、実際に操作することのできるデジタル入出力ポートの実装は、モーションコントローラのハードウエアによって異なります。操作が可能なポート番号は、各ハードウエアの取扱説明書に明記されています。
ロボットエラー(Robot error)
ロボットエラー(Robot error)は、各ロボットの稼働に関わるエラーです。例えば、位置決め移動中にオーバトラベルセンサを検出した場合などに発生します。詳細はロボットエラーを参照してください。
論理原点
プログラム上の原点です。機械原点と異なる位置をプログラム原点に設定することができます。機械原点とプログラム原点のオフセットを作るためには、コンフィギュレーションファイルのLogicalHomeToMechanicalHomePulseパラメータにて原点復帰完了時のシフト量を設定する方法、または任意位置にいるときにプログラムでRobSetJointPosition関数、RobSetPulsePosition関数を使用して位置をゼロに設定する方法があります。
論理軸
論理軸とは、例えば「ロボット1の1軸目、2軸目」のような、ロボット内の個々の軸の呼び名です。論理軸番号はAxisパラメータの「Axis=」に続くの8つの数字の並び順で、左から順に論理軸1、論理軸2、…、論理軸8のように並んでいます。
AnalyzerAM3
AnalyzerAM3はMOTIWAREに付属するユーティリティソフトウェアです。作成したプログラム動作解析のために、ロボットの各軸の現在位置、DIN/DOUT(ポート番号に制限あります)などの動作を定周期サンプリングして、波形表示したり、そのデータを保存したりできます。
ConfigAM3
ConfigAM3はMOTIWAREに付属するユーティリティソフトウェアです。コンフィギュレーションファイルをPCにアップロードする、編集する、PC上に保存する、PCからモーションコントローラにダウンロードする、といった機能を有します。
CurrentPosition(予約語)
CurrentPositionは移動命令時に動作させたくない軸(現在の座標を維持する軸)に対して指定します。この値を指定した軸は移動せず現在の座標に留まります。
JOGパルサ移動
手動パルサ(手動で回転式のハンドルを回すことにより、回転運動をA相/B相のエンコーダパルス信号に変換する装置)のパルスに同期して、ロボットの軸を手動で移動動作させること。RobJogMove関数、RobJogJointMove関数で移動を許可します。
JOGパルサ移動を行うには、コンフィギュレーションファイルのJogMovePulserパラメータで手動パルサ入力として使用するロボットの論理軸番号を設定する必要があります。
ManagerAM3
ManagerAM3はMOTIWAREに付属するユーティリティソフトウェアです。ロボットごとに、各軸の現在位置やセンサ状態、エラー等の基本情報モニタと、エラーのリセット、サーボ電源制御、原点復帰指示、JOG移動、インチング移動などの基本的操作を行うためのWindowsアプリケーションです。機械装置組上げ後の基本動作確認などの場面で使用します。
MaxRobAxes
ロボットあたりの最大軸数で、8です。
MOS関数
プライムモーションが提供するMwControllerの組み込み関数。モーションやIO等の機械制御に適した、豊富な機能を用意しています。
MOS言語(MOSランゲージ)
MwControllerのプログラミング言語。習得しやすく、構造化や再利用が容易な、C言語によく似た言語です。機械制御に適したMOS関数を利用します。
MOSBench
MOSBenchは、統合開発環境のMOSBenchIDEと、ソフトPLCのMwControllerを合わせた総称です。
MOSBenchIDE
MOSBenchIDEはMwControllerの統合開発環境で、プロジェクトの管理、ユーザプログラムの作成、ビルド、ロード、変数のモニタ、デバッグ等の一連の作業を行うWindows上のソフトウエアです。
MOTIWARE
MOTIWAREはリアルタイムOS上に構築されたソフトウエアモーションコントローラの中核部分で、モーション制御やIO制御などを行います。
MOTIWARE Service
MOTIWAREの機能を便利に使えるように、モーションコントローラ内に常駐するプログラムです。PCベースモーションコントローラでは、PC画面右下のタスクトレイにあるMOTIWAREアイコンにてMOTIWARE Serviceを起動させます。InterMotionでは、InterMotionの電源をオンすると自動的に起動します。
MOTIWARE Tools3
MOTIWARE Tools3はMOTIWAREに付属し、Windows上で動作するユーティリティソフトウェア集です。ManagerAM3、AnalyzerAM3、ConfigAM3の3つのソフトウェアを含みます。
MwController
MwControllerはリアルタイムOS上に構築されたソフトウエアPLCです。ユーザが作成した複数のプログラム(機械制御プログラム)を、同時並列的に、かつリアルタイムに実行することができます。
PTP動作
PTP動作とは"Point To Point"のことで、移動経路よりも始点と終点の位置を重要視する制御方式です。複数軸で構成されたロボットでは、動作する軸のうち最長の経路を最短時間で移動するよう制御します。途中の経路を問題としないため、原則として直線軌道にはなりません。
■電話番号
0265-82-2990
■電子メール
support@primemotion.com
■プライムモーションWebサイト
https://primemotion.com/